先端研究部
Hybrid Artificial Intelligence
ハイブリッドAI
データ駆動型AI・理論知識型AIのハイブリッド
データ駆動型AI は、ディープラーニングのようなデータに基づき統計・確率的な手法を用いたAIです。理論知識型AIは、人が持つ知識をモデル等で表現するAIです。この2種類のAIを繋げることがハイブリッドAIです。こうした試みは産総研人工知能センターで、すでに取り組まれています。辻井研究センター長は、「人に寄り添うしなやかな」人工知能とは、大量データに基づく「人間を超える」人工知能と、人間の知能をモデルとする「人間に迫る」人工知能の技術を融合させることにより、人間と協働できる、人間に理解でき、人間が共同できる人工知能を実現できると述べています。このようなハイブリッドAIを組込みシステムでどのように実現するかを研究する場が先端研究部です。人間の脳に右脳・左脳があり、脳梁が右半球と左半球を繋いでいます。データ駆動型AIと理論知識型AIを接続し、組込みシステムに埋め込むイメージが図1になります。
組込みハイブリッドAIのイメージ
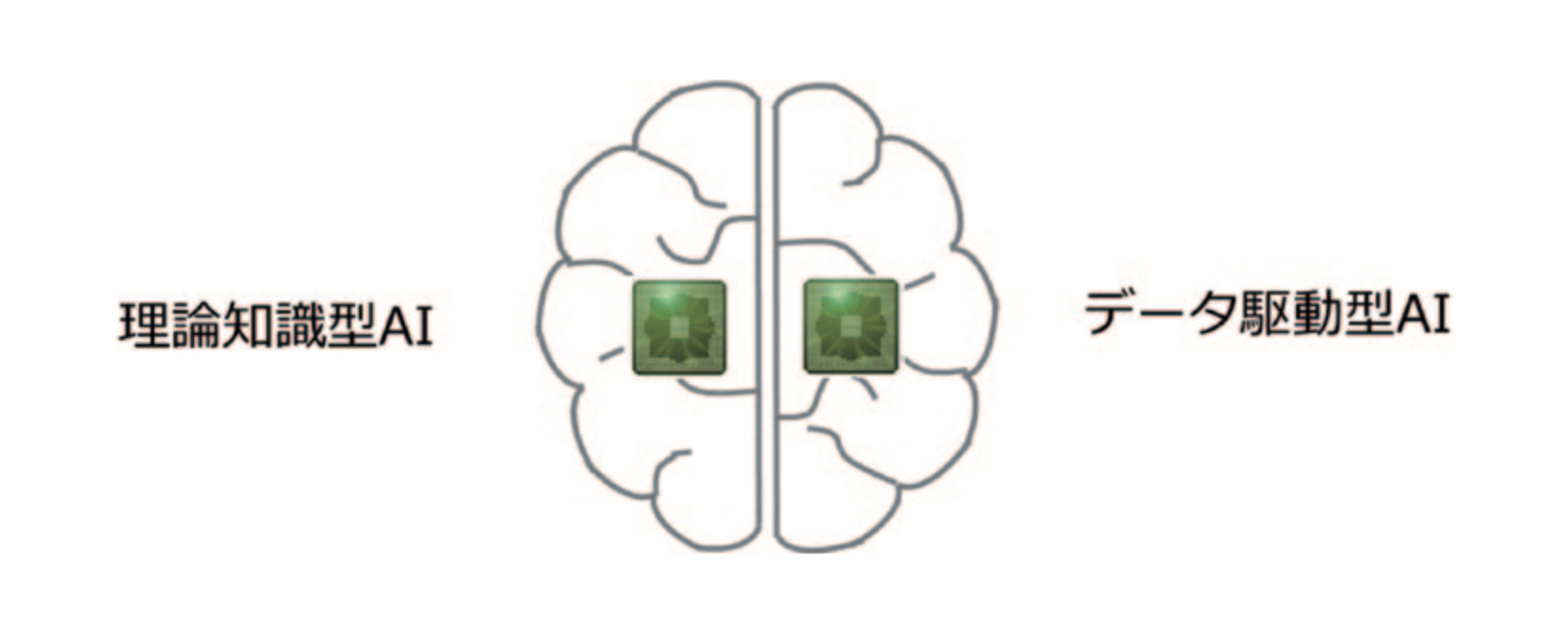
[図1]組込みハイブリッドAIのイメージ
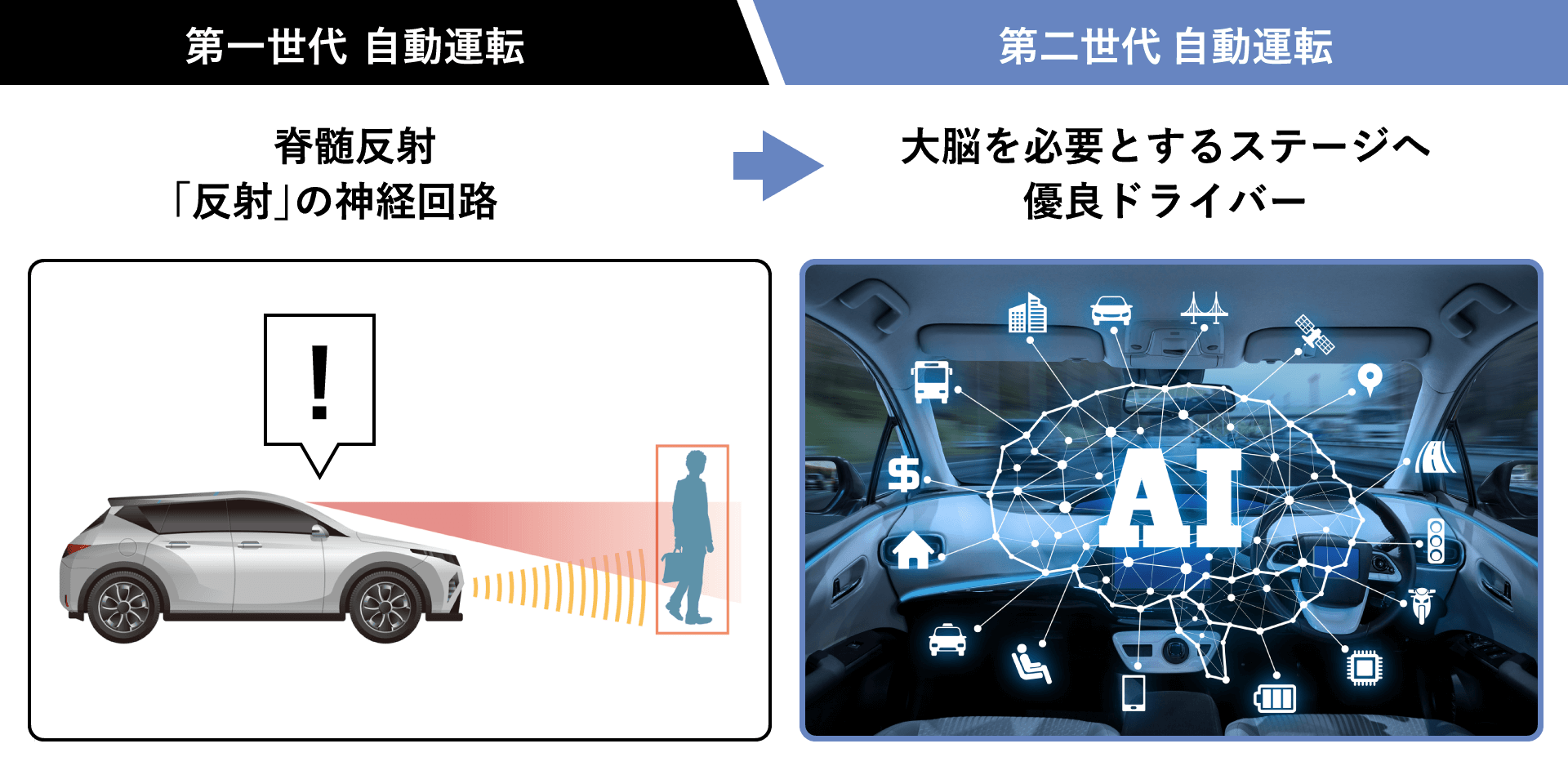
自動運転は第二世代へ
SRKモデル
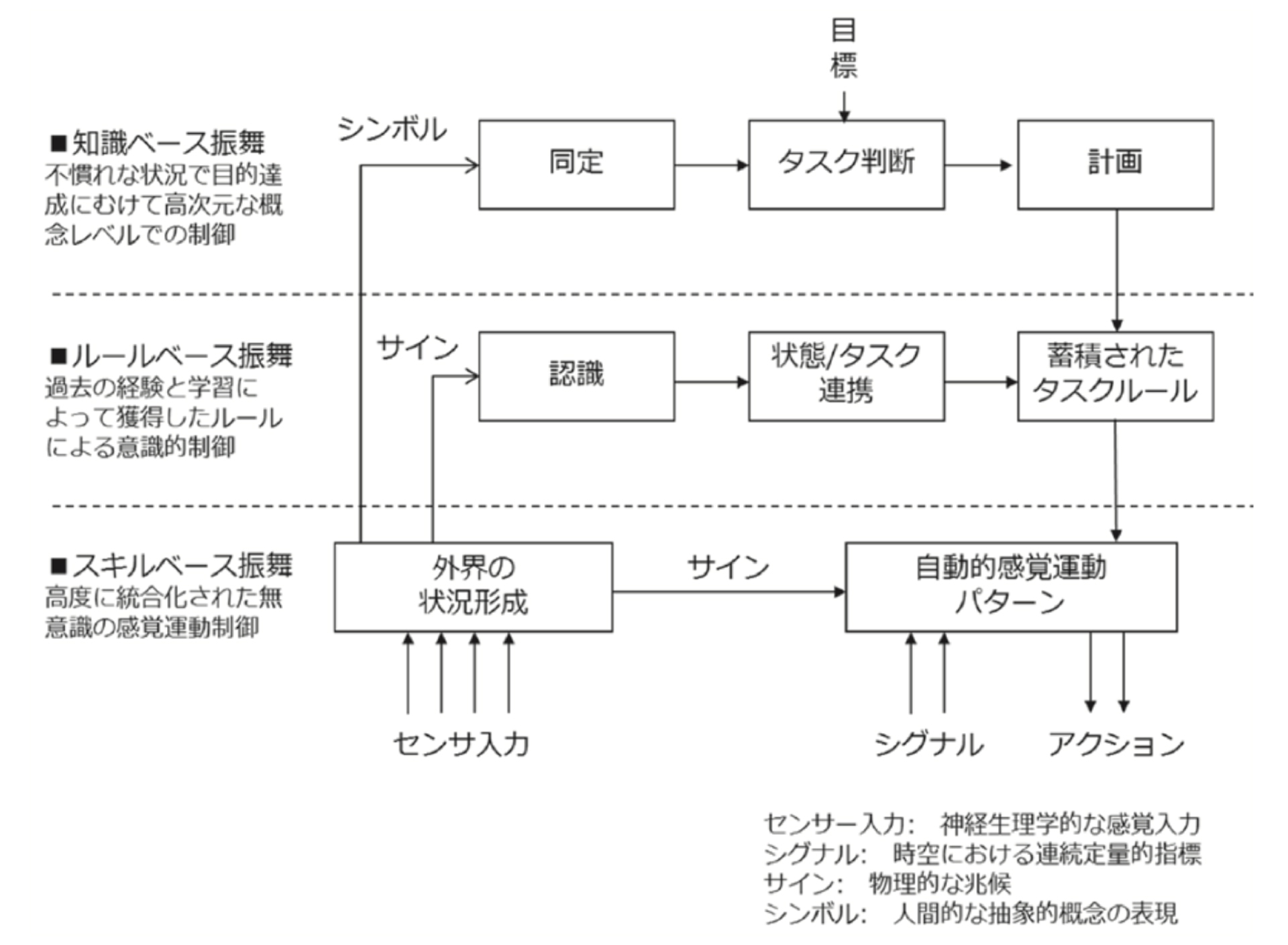
[図2]SRKモデル
まだあるハイブリッドの種類
ハイブリッドを技術融合と定義すると、ハイブリッドの組合せはデータ駆動型AIと理論知識型AIだけではなく、他にもあります。図2に示すRASMUSSENの熟練ヒューマンオペレータレベルSRKモデルは、スキルベース振舞(S)、ルールベース振舞(R)、知識ベース振舞(K)の3層に分かれています。それぞれの層の間や同一層での技術融合があります。どんな組み合わせがあるかは、この後に順次紹介します。
制御工学・データ駆動型AIのハイブリッド
スキルベース振舞層[図2]の「外界の状況形成」にデータ駆動型AIであるディープラーニングが用いられ、「自動的感覚運動パターン」に制御工学が用いられます。スキルベース振舞は、人間で言うところの感覚領域で、一般的に右脳の領域です。この感覚的な右脳領域のAI化に、ディープラーニングや制御工学のように計算や理論によって開発されるのは何とも面白いですね。ところで、右脳派・左脳派といった区別は、専門家の見地では都市伝説レベルなんだそうだ。
目を手に入れた
カメラからの映像をディープラーニングで、特定の物体として認識できるようになりました。物体の位置はミリ波レーダーによって分かります。これらによってコンピュータは目を手に入れました。
物体認識できる
カメラの映像からそれが何かを判断することは、従来とても難しいことでした。ディープラーニングはこれをブレークスルーする技術として注目されています。図4にディープラーニングの仕組みをざっくりと示します。大量のボールの画像データを与えることで、サッカーボールとしての特徴点を抽出し、サッカーボールを判定する学習モデルが生成されます。こうして手に入れた目が「外界状況形成」の一部を担っています。
物体認識と物体の位置の認識
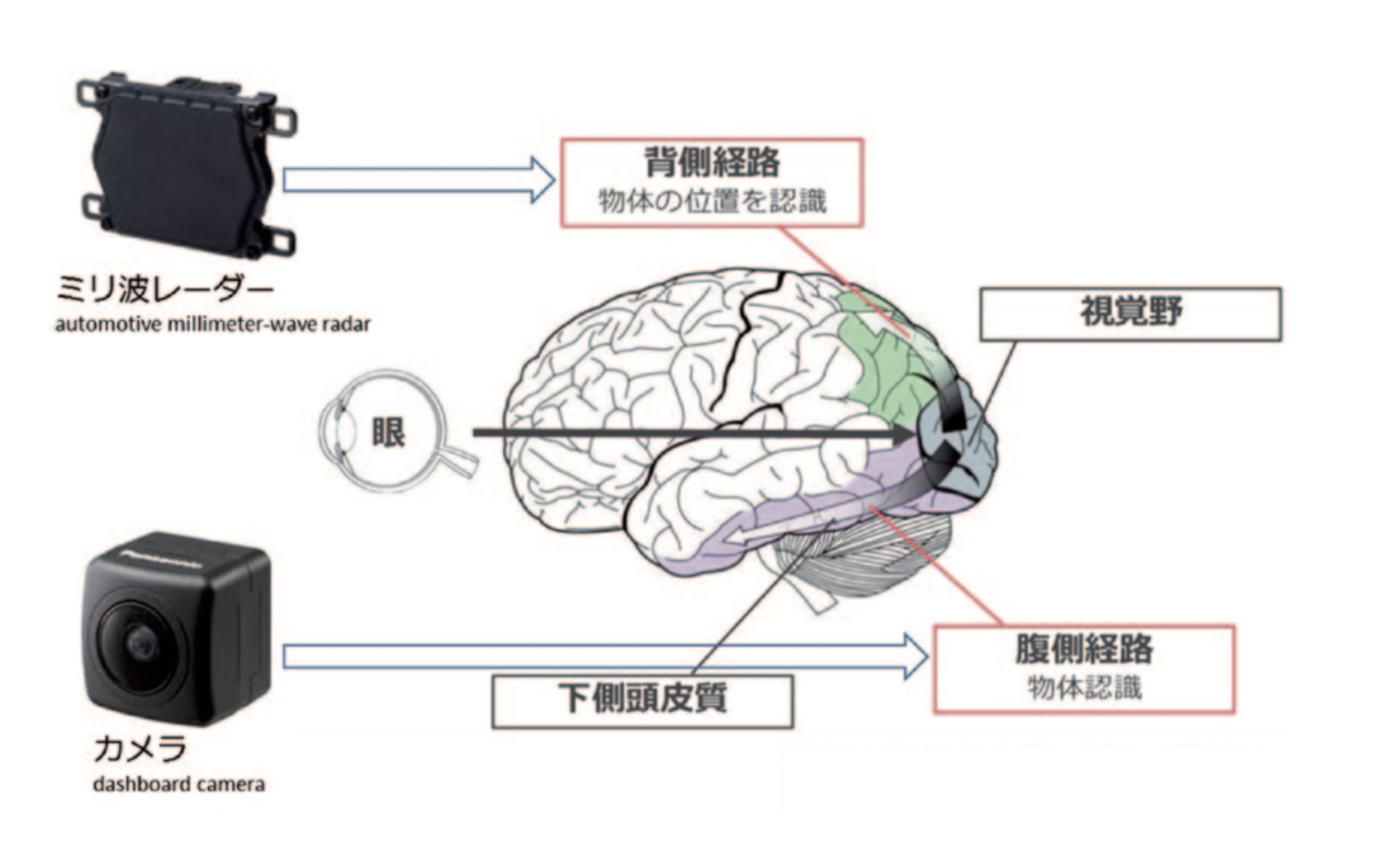
[図3]物体認識と物体の位置の認識
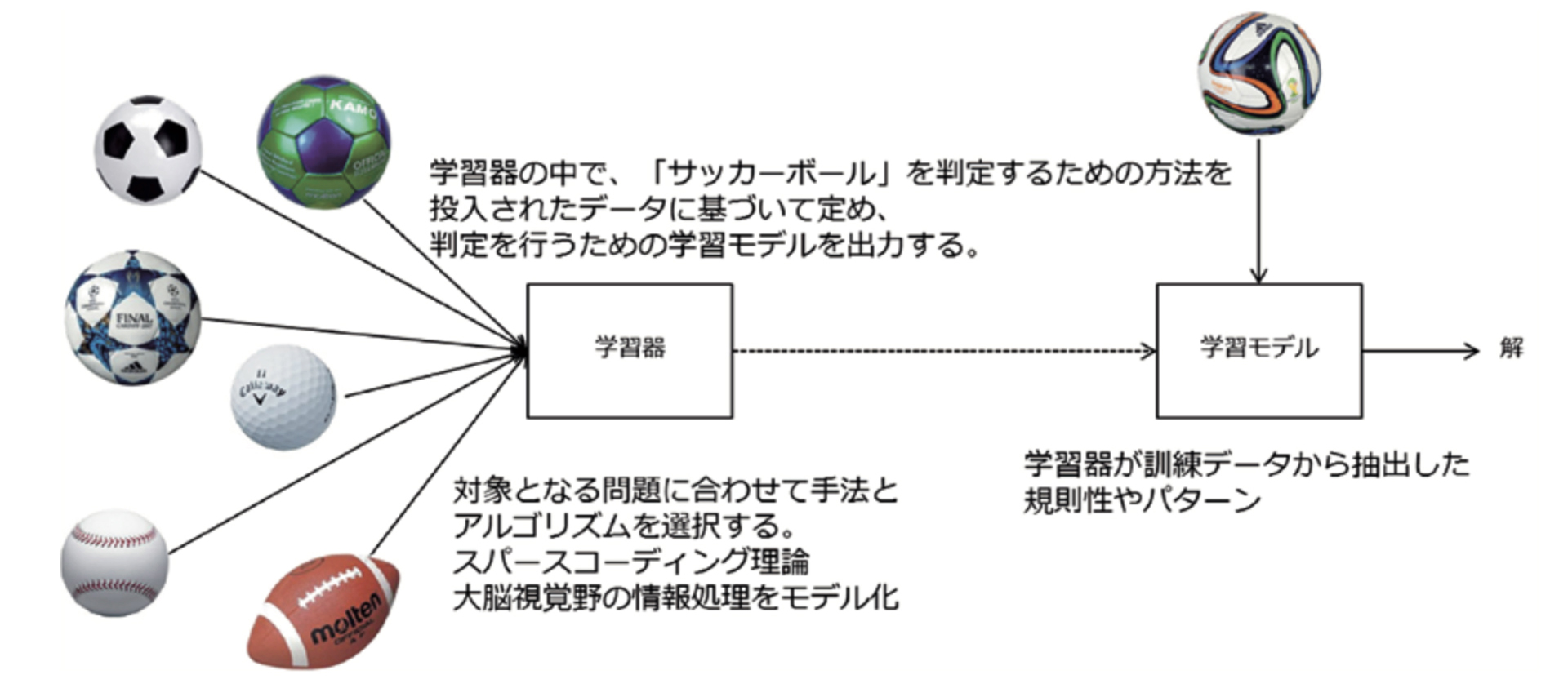
[図4]サッカーボールを認識する
制御工学の成果をパッケージ化
ROS(Robot Operating System)は、ロボット・アプリケーション作成を支援するライブラリとツー ルを提供するOSS(オープンソースソフトウェア)です。OSではありません。ROSが提供するライブラリとツールを使って、ソフトウェア技術者でもロボットを簡単に操作することができるようになりました。NAO(図5)やペッパーにもROSが使われています。「自動的感覚運動パターン」をスクラッチ開発するのではなく、ROSパッケージを再利用できる時代になったんですね。
障害物を避けて目的地へ到着
ROSパッケージを使うと何ができるのでしょう。何と、ロボットが障害物を避けて目的地へ到着するためのアルゴリズムを再利用できちゃいます[図5]。ダイクストラ法により目的地の最短ルートをグローバル(大域的)に決めることができます。走行中にカメラがとらえた物体がディープラーニングによってサッカーボールだと認識したとします。このままだとロボットの進行にじゃまになるので、ダイナミックウインドウアプローチで、現在の速度に基づき、実行可能な複数のローカル(局所的)パス候補を生成し、コスト(距離や時間)の少ないパスを選択することができます。
ROSパッケージでできること
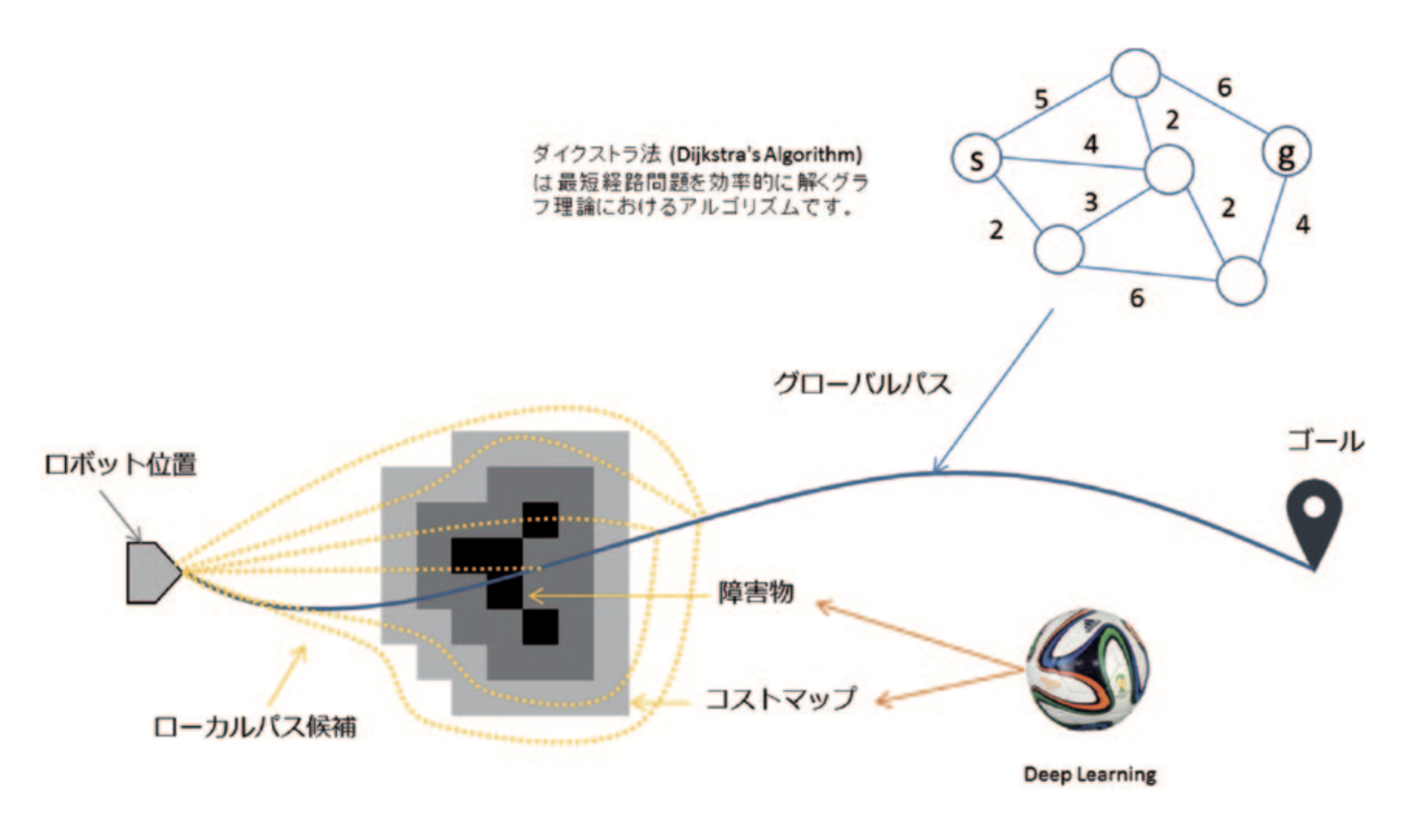
[図5]ROSパッケージでできること
CONTACT
導入に関する質問やご相談、サポートに関することなど、まずはお気軽にご相談ください。