RB(RuleBase)
Rule-based platform for edge intelligence
Background/Challenge
It is too risky to completely rely on deep-learning type AI for life-critical controls such as self-driving.Therefore, it is important to control AI for monitoring derived from deep-learning AI so that it follows traffic laws and manners based on rules.
Solution
RB(RuleBase) is a platform with a rule-based engine that can be embedded into an edge with its small footprint and with MBD tools modeling CEP (Complex Event Processing) in state transition. The target areas are all edges with intelligence, especially, it is especially attracting attention from businesses in the automotive area including ADAS (Advanced Driver-Assistance Systems) and already has a proven track record.
Rule-based light engine for embedded software&AI system development platform
It is a development environment where you can design rule-based engines quickly judging if a condition (rule) matches the status extracted from extensive information, and its rules, using Decision Table (DT) Editor.It supports C language and porting into various environments for embedded software is possible.
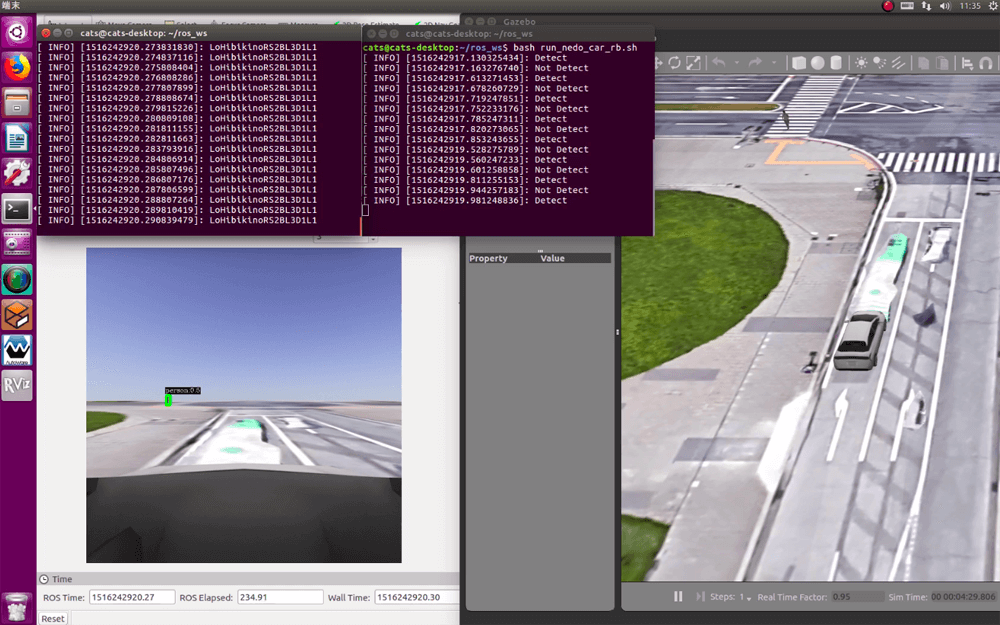
Verification to make the self-driving system operate faster
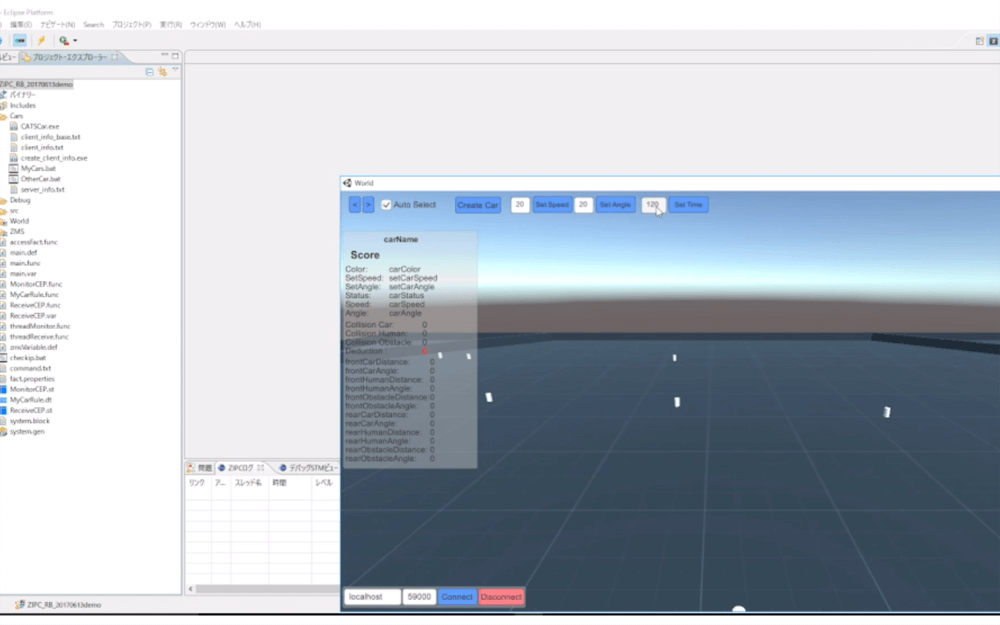
Learn rule-based architecture with Self-Driving Agent.
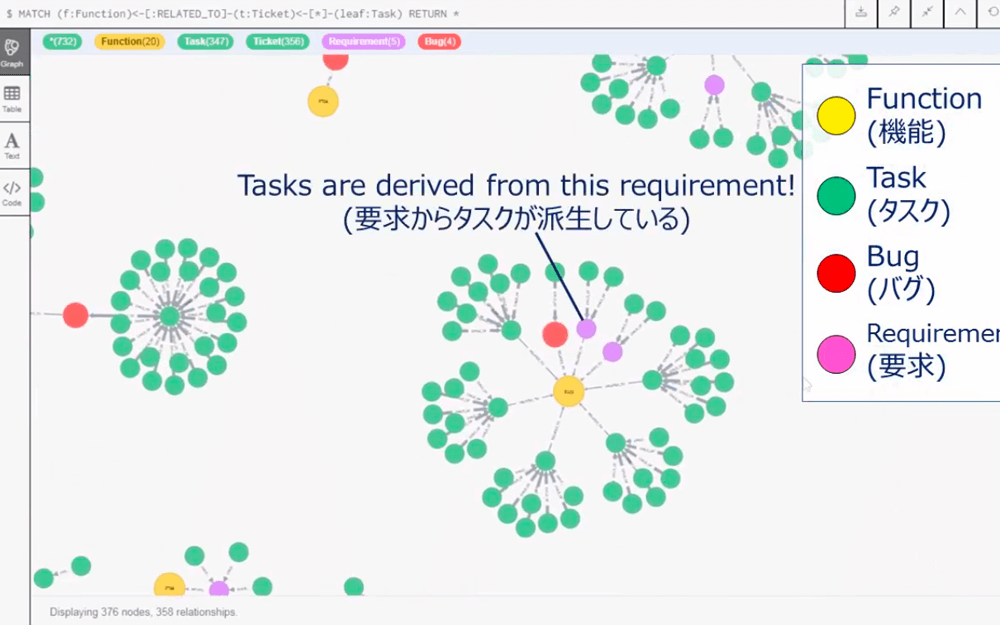
Visualization of software development process leveraging Graphic DB
CONTACT
If you have any question, inquiries, or support regarding instllation or other, please feel free to contact us.