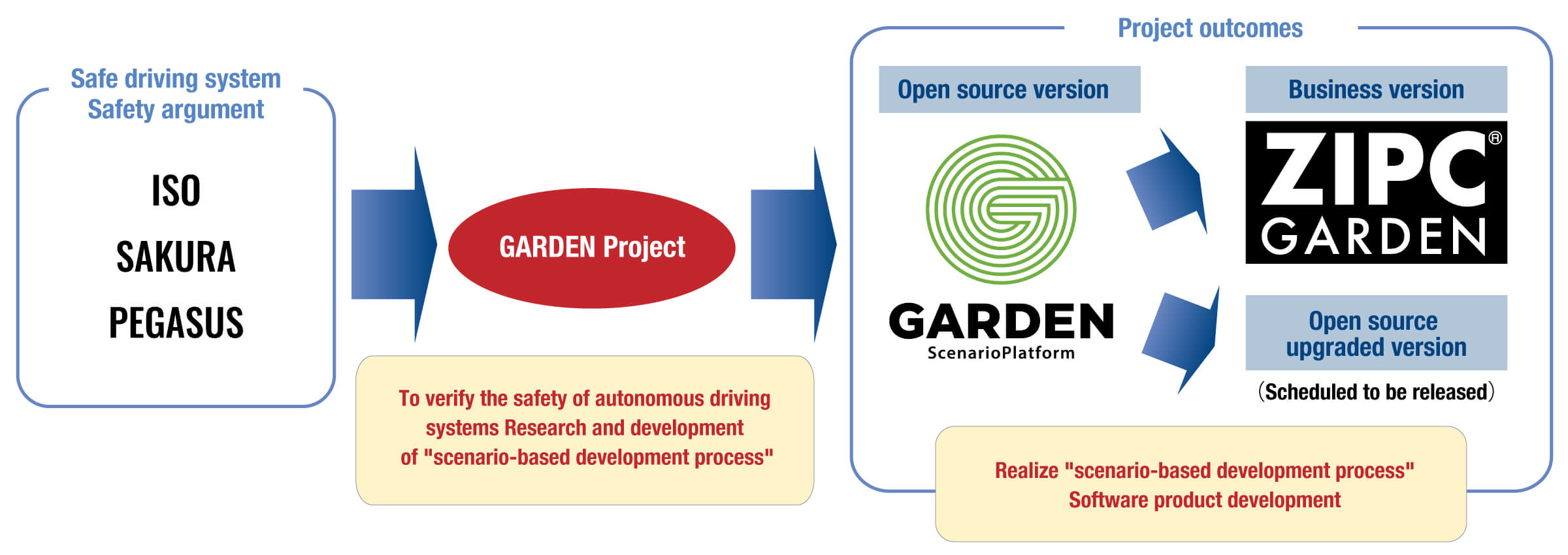
GARDEN Project
Based on self-driving system safety argument
Realize "scenario-based development process"
Background-For the safety assurance of autonomous driving systems-
In order to put autonomous vehicles into practical use, it is the most important to ensure the safety of the autonomous driving system installed.
Currently, a vast amount of real-vehicle driving tests are conducted to guarantee the safety of autonomous driving systems. Even if such driving tests are repeated, it is difficult to guarantee a system that covers all driving scenarios.
Based on such issues, the safety argument system and safety evaluation method are being studied in Japan and overseas. And there is a need for a mechanism to actually reflect the results of these studies and ensure the safety of autonomous driving systems.
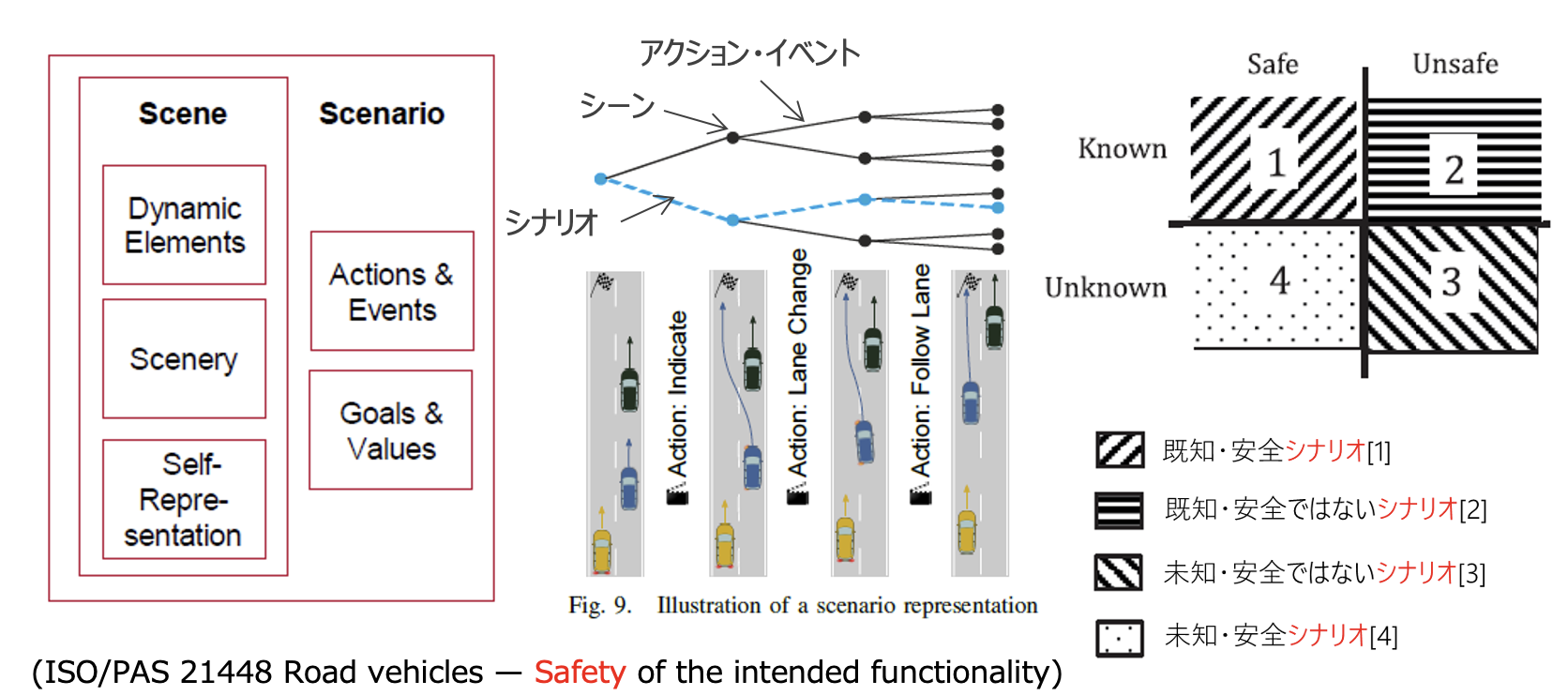
SOTIF(ISO21448)
In order to analyze the possibility that the performance limit of the autonomous driving system would cause an accident, the components of the scenario are defined, the scenarios are classified into four categories along the Known / Unknown and Safe / Unsafe axes, and the scenarios are verified to be Known and Safe. We are looking for activities to expand the territory.
SAKURA Project
Organize and present traffic disturbance scenarios that affect the processing of autonomous driving systems
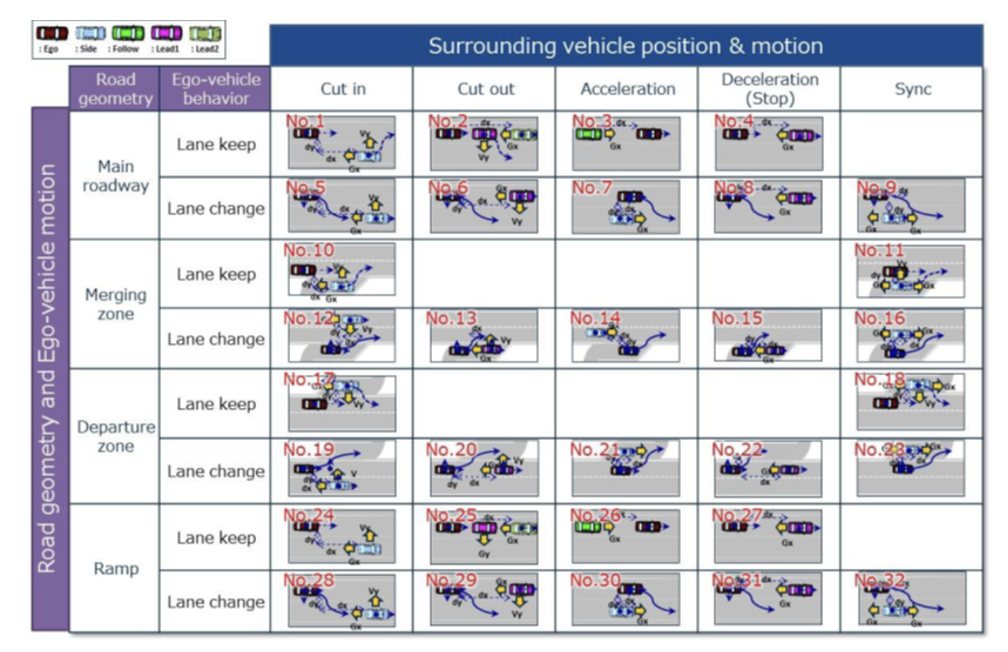
“AD Safety Assurance Methodology”, JAMA AD safety Assurance WG, chair Toyota Motor Corporation Satoshi Taniguchi, JARI AD safety standardization group, manager Jacobo Antona Makoshi PhD., 19.06.12, HEADSTART Expert Network Worksho
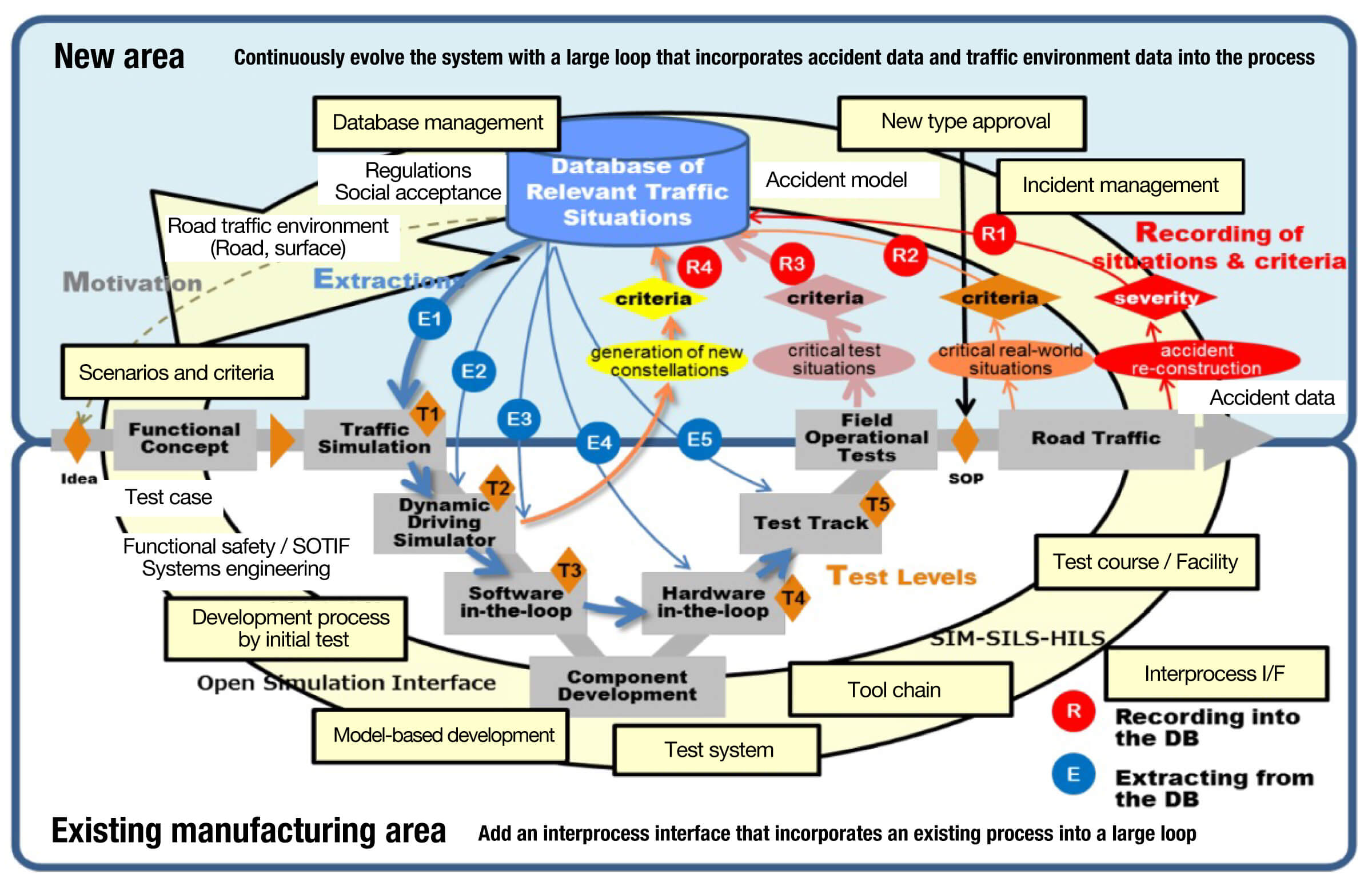
PEGASUS Project
(Germany) Evaluation process of autonomous driving in PEGASUS
The PEGASUS Project, which is currently formulating an autonomous driving system safety evaluation method, advocates the need for a big loop that feeds back accident data and traffic environment data related to products after mass production and marketing, in addition to the conventional evaluation loop of the V-shaped process, as a development process to evolve and grow next-generation automobiles.
As the weight of software in the development and operation of autonomous vehicles increases in the future, the following innovations are expected to be realized by enabling virtual simulation using a digital twin space that accumulates, analyzes, and covers data and knowledge related to driving scenes.
・Innovations that enable safety verification at an early stage of the mass production process
・Innovations that save labor for testing and calibration
・Innovations to improve design and implementation through feedback of post-market operational monitoring results
Source: Autonomous Driving Business Study Group "Policy for Initiatives to Realize Autonomous Driving" Report Outline Version2.0, March 30, 2018 Autonomous Driving Business Study Group
http://www.meti.go.jp/report/whitepaper/data/pdf/20180330002_03.pdf
What is GARDEN?
GARDEN is a research and development project that promotes a "scenario-based development process" to realize effective and efficient simulation verification of autonomous driving systems by generating structured scenarios of external factors that autonomous driving systems face, based on autonomous driving system safety arguments being considered in Japan and overseas with the aim of practical application of autonomous driving systems.
As a result of the R&D project, an open source version of the autonomous driving system validation software "GARDEN ScenarioPlatform" has already been released, and now we are releasing a proprietary version of "ZIPC GARDEN" that reflects the knowledge and customer feedback obtained through the open source activities.
In addition, we will continue to upgrade the open source version and utilize it to create better products that contribute to our customers.
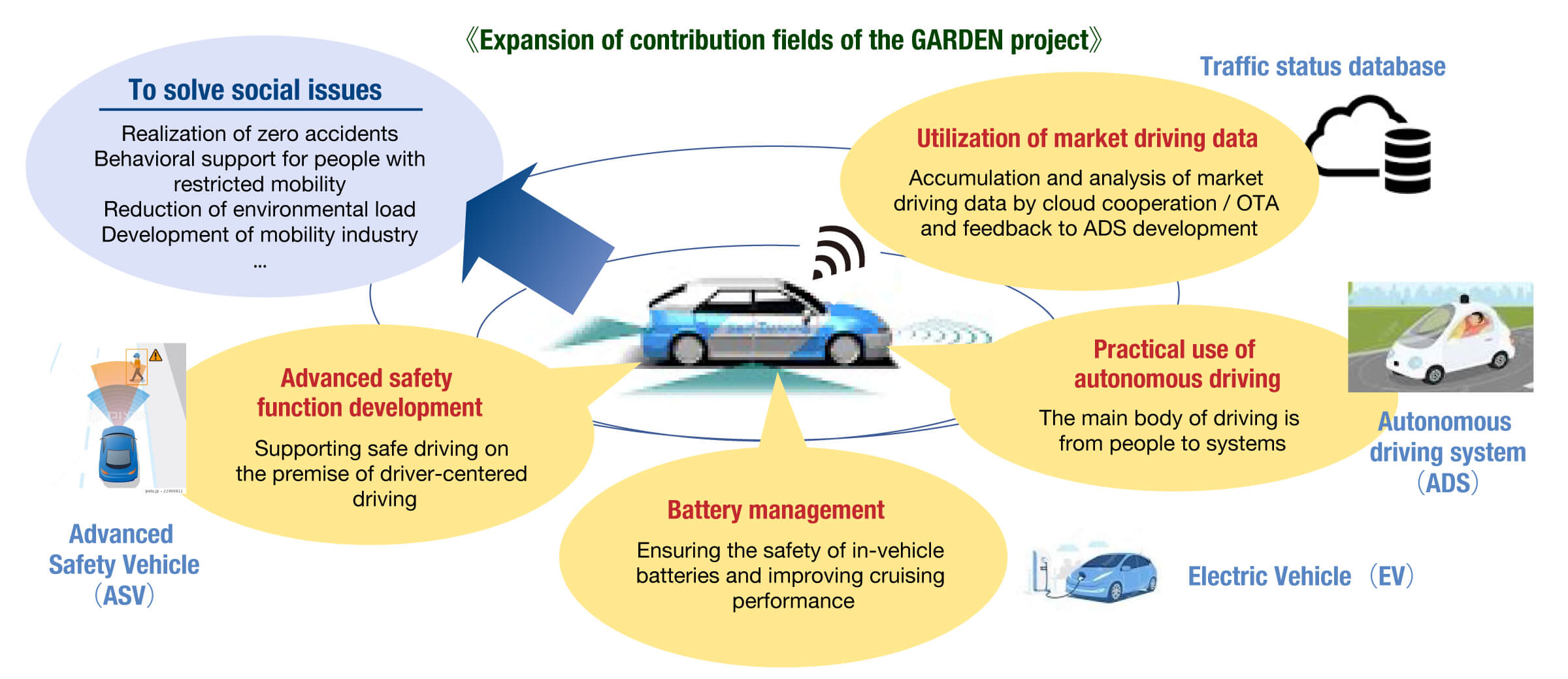
Areas of contribution of the GARDEN project
Currently, "Advanced Safety Vehicles" (ASV) are becoming widespread as a preparatory stage for the practical application of autonomous driving systems (ADS).
On the other hand, there is a need to improve the performance of electric vehicles (EV), which are becoming more widespread.
The GARDEN project will contribute to these fields by promoting the "scenario-based development process".
We also aim to solve social issues by utilizing various types of traffic data, such as accident data in market driving.
Open source version automatic driving system verification platform software "GARDEN Scenario Platform"
The open source version of the autonomous driving system verification platform software "GARDEN Scenario Platform" generates scenarios that can be executed by the simulator of autonomous driving software based on the scenario-based development framework.
We hope that this open source will be widely used by automakers, suppliers, and other parties involved in the development of autonomous driving software, thereby contributing to the promotion of autonomous driving system development and the advancement of related MaaS businesses.
GARDEN ScenarioPlatform [The first version of OSS, Acacia, is now available]
![GARDEN ScenarioPlatform [The first version of OSS, Acacia, is now available]](/en/images/GARDEN_project4_en.jpg)

How to use GARDEN Scenario Platform
The source code of the first version of this OSS, "GARDEN Scenario Platform acacia", will be released free of charge on the GitHub repository and licensed under the NewBSD license. The user can use or repair the source code after agreeing to the license terms attached to the source code.
For source code acquisition, confirmation of usage procedures, and technical inquiries, please visit the website below.
CONTACT
If you have any question, inquiries, or support regarding instllation or other, please feel free to contact us.