News Release
News Release
GARDEN Project Release Open Source for Validating Autonomous Driving Systems
- Source Code of "GARDEN ScenarioPlatform" for free -
NTT DATA Automobiligence Research Center, Ltd.
On June 18,2021, NTT DATA Automobiligence Research Center, Ltd.(abbreviation:ARC) released "GARDEN ScenarioPlatform". This is open source software developed through the GARDEN project, which aims to promote the development of various software functions for next-generation mobility. this works as a platform for scenariobased validating autonomous driving systems.
ARC hopes that this free and refurbish able open source will be utilized widely in the automotive industry. As a result, it would be grateful to promote the development of autonomous driving ststems.
Background and Purpose
Today, when the automobile industry and transportation society have entered the CASE era, automotive industry companies are energetically pursuing research and development toward the realization of autonomous driving. Ensuring the safety of this system has become a major issue. Safety validation is also becoming more important in the software development process that forms the basis of autonomous driving systems.
ARC is an R&D center in NTT DATA's automotive software business. ARC believes that using scenario-based processes in the development of autonomous driving software by OEM and suppliers is an important solution for achieving sufficient and efficient safety validation.ARC has decided to release this scenario-based validation platform software as an OSS that incorporates some of the results of the R&D project "GARDEN", for free.
Function overview of GARDEN ScenarioPlatform
GARDEN ScenarioPlatform supports the scenario-based validation process in autonomous driving software development and generates executable scenarios in the functional operation simulation of autonomous driving systems.
This OSS user will be able to analize the driving data obtained from FOT etc., extract the scenario, and specify the parameter range from the statistical processing. When building a validation scenario obtained from expertise, it is possible to gradually grow from ahighly abstract scerario description to a concrete scenario that can be simulated.
CARLA is used in the simulation.It is possible to connect to Autoware and Simulink.There is also an interface that can link with existing simulators that support the international standard formats OpenSCENARIO and OpenDRIVE in scenario-based development.
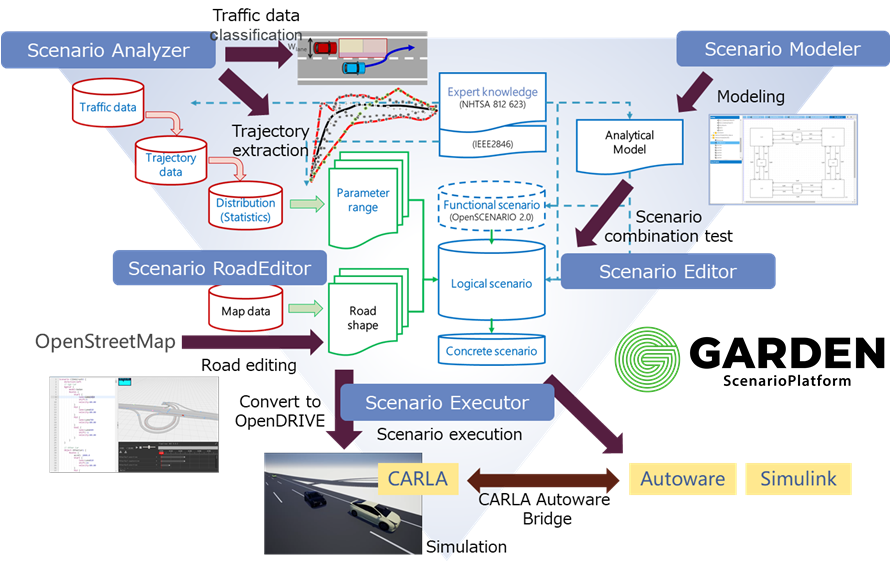
Fig. Functional overview of GARDEN ScenarioPlatform
How to Use
The source code of the first version of OSS "GARDEN ScenarioPlatform acacia" is released free of charge on the GitHub repository and is licensed under the NewBSD license. The users can use or modeify the source code after agreeing to the license terms attached to the source code.
For source code acquisition, confirmation of usage procedures, and technical inquiries, please visit the website below.
GARDEN Project URL:http://open-garden.github.io/garden/
Future plans
We will promote the utilization of this OSS in cooperation with businesses that utilize this OSS and develop autonomous driving systems.
We will continue to release upgraded versions.
* The contents of this release are subject to change without notice.
* "GARDEN ScenarioPlatform" is a trademark of ARC.
* Other product names, company names, and organization names are trademarks or registered trademarks of their respective companies.
Inquiries regarding this release
NTT DATA Automobiligence Research Center, Ltd.
Strategy Business Div.
EMAIL:info@zipc.com URL:https://www.zipc.com/