

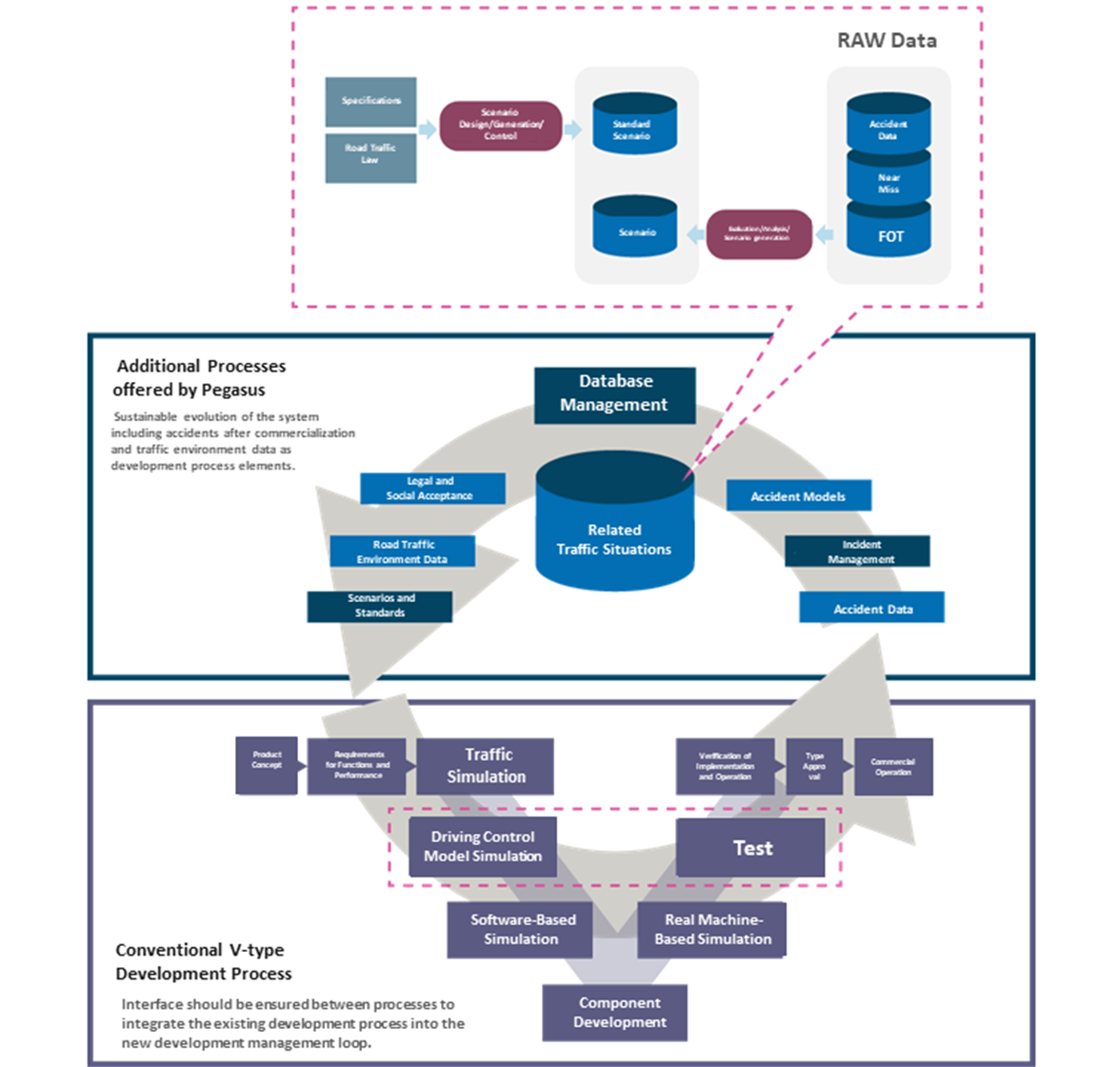
GARDEN verifies self-driving software based on scenarios.It is a comprehensive verification environment (platform) generating scenarios automatically and realizing precise and efficient verification with various simulators.
By extracting critical scenarios from "Road Traffic Law", "Guidelines", "Driving Data", "Accident Data", etc., it generates scenarios automatically based on rules for road signs and dynamic parameters.
The logical combination is extracted with N-wisemethod.
In addition to high-quality visual images, you can reduce verification man-hours in real space by generating point group data through LiDARfunction.
For example, suppose you want to send different alerts to a driver from a hot country, not familiar with snowy roads, and a driver from a cold country, familiar with snowy roads.Table 1 and Table 2 are decision tables modeled with the editor of ZIPC R&B.Table 1 shows the road condition is categorized into 3 conditions of Dry, Wet and Snow and corresponding rules for each condition are called.Table 2 shows different rules for the alert when a rut is found on a snowy road depending on whether the driver has experience on a snowy road or not.On the simulation display of ZIPC R&B, you can check how alerts are shown on the Head Up Display (HUD)( Figure1).

We provide it as a platform with a rule-based engine with a small footprint, which can be embedded into an edge, and with MBD(Model-Based Development ) tool modeling CEP (Complex Event Processing) in state transition (Product Name: ZIPC R&B).The target areas are all edges with intelligence, especially, it is attracting attention from businesses in the automotive area including ADAS (Advanced Driver-Assistance Systems) and already has a proven track record.
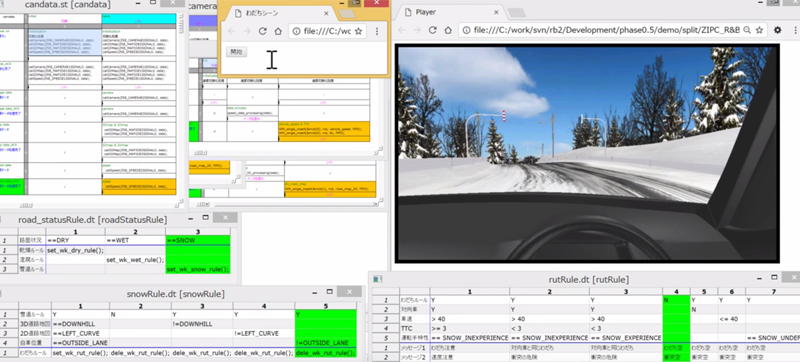 (Figure 1)ZIPC R&B Simulation Screen
(Figure 1)ZIPC R&B Simulation Screen
 (Table 1) Road Condition Decision Table
(Table 1) Road Condition Decision Table
 (Table 2)Rut Alert Decision Table
(Table 2)Rut Alert Decision Table
